HerbJet Weeder
A very, very fast precision-pesticide weeder that can cut golf course pesticide use by 95%, at scale, cost-effectively.
Why care about golf courses?
Most of the pioneers in agriculture rightly occupy themselves with figuring out how to feed everybody, so why care about golf courses?
Impact: Golf courses are much more likely to be near dense population centers, where fertilizer and herbicide runoff are more likely to cause more severe problems. Additionally, on a per hectare basis, golf courses are one of the biggest users of herbicide, because of the expectation of pristine turf.
Demand: For many courses, finding a way to curb herbicide use is a matter of survival. This trend is a growing one.
Focus: We would like to focus on the vision system and not the rover itself. Identifying weeds in dense turf may be one of the most challenging settings to do so. However, properly solving the challenge of weed detection is key since it seems to be the bottleneck in many other precision agriculture systems. Rolling around golf courses and sports fields while perfecting your vision system is a lot easier than traversing farmland.
The proposed system
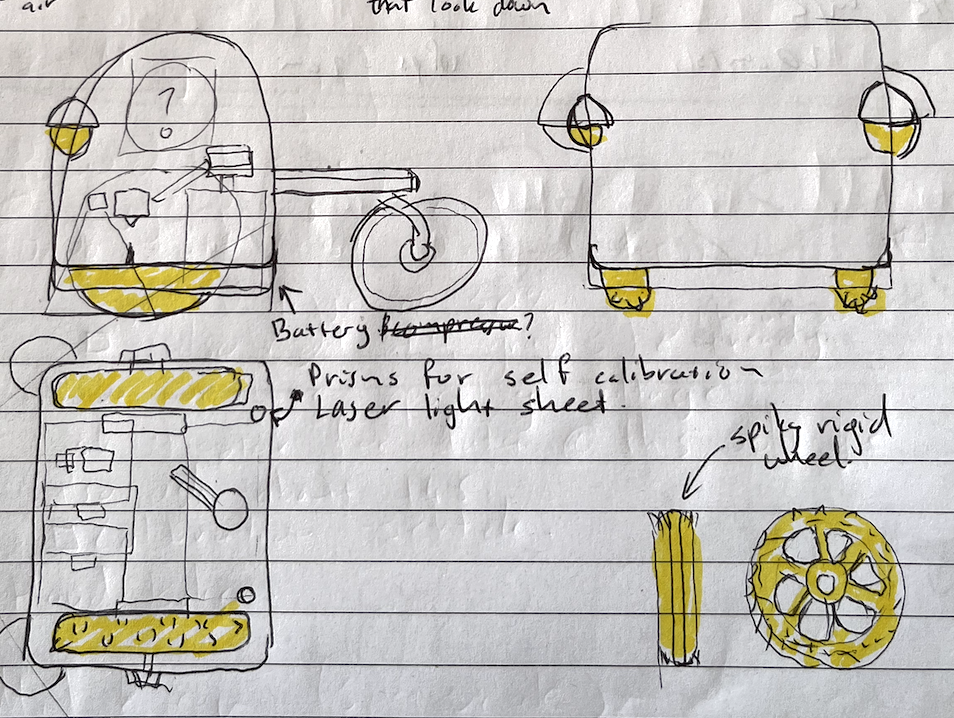
The plan is to build a commercially viable product, therefore the important metrics are cost, speed and accuracy.
- The sprayer. Yes we will still use herbicide. In a world where lasers and mechanical tillers are gaining acceptance it seems somewhat backwards to use herbicide, however when it comes to speed, a relay activated nozzle array really can't be beat (at least at this scale, at the moment). So yes, we will use a nozzle array and try to get caretakers to use 5 units of herbicide where they might once have used 100 units. It's not 0, but its a big win.
- The vision system. As stated above, this is likely to be the bottleneck in our system i.t.o. speed so it makes sense to give this some attention. If we use a AGX orin with a single 5MP camera with a field of view of around 1.25m * 1m one would get an effective resolution of around 2 px/mm, which should be enough to identify very young weeds. If we specify a frame overlap of 50% we should be able to move at a very respectable 3m/s and have the identification computation done before the nozzle array hits the weeds. For a 1.2m wide vehicle that would translate to 3.6 m^2/s. If we allow significant overlap that comes down to around 2.5 m^2/s, or just under 1 hectare/hr
- The preliminary drive system will comfortably manage the requisite 3 m/s and have a 2 hr runtime, however this figure is more academic, the system will be scaled such that the battery will be replaced when the tanks are refilled, but these are likely starting values.
Cost and Performance
The preliminary BOM puts the vehicle cost close to $15k, which is a hefty tag. However the ability to precisely weed around one hectare of turf per hour might make it worth it.
Weeding and Seeding
One of the central strategies for weed control is grass density management. If there is dense turf there is no space fot the weeds to grow into. Divets and holes caused by golfers create nucleation sites where the weed seeds can germinate. A good way to prevent this is to seed the site with fast germinating grass. Since we are already putting the whole turf under the microscope it would be trivially easy to identify holes and divets in the turf. If we are able to devise seed spreaders that are able to keep up with the herbicide application system we could easily incorporate both methods in one pass.
Summary
This is a project worth doing and I'm confident I can do it. Now I need to find some money.